How drones, scanners, and 360° cameras captured every angle of a 500-year-old chateau
AirView, 3gon, and Mosaic joined forces to create a complete digital twin of Červená Lhota, one of Bohemia’s most iconic (and also most surveying-unfriendly) heritage sites. Using different capture devices, the teams produced more than 120 GB of aligned data, all viewable in AVAG.

Challenges
A large fishpond surrounding the chateau on all sides made scanner and drone placement genuinely difficult
Aligning indoor and outdoor data from different devices into one place
Capturing facades, all interiors, the atrium, bridge, terrain, park, and surrounding roads in a single day
Solutions
AirView brought the Matrice 400 with L3 LiDAR, Mavic 3 Enterprise, and the Mosaic X mounted on a car, covering the chateau from above and all surrounding roads
3gon covered the building itself with three Faro scanners: Focus for long-range exterior precision, Orbis for complete interior coverage, Blink for fast HDR ground-floor capture
12 shared ground control points registered all datasets to EPSG 5514, allowing every layer to align perfectly in AVAG
Results
Full building documented to under 1 cm accuracy with Faro Orbis
~120 GB from different devices aligned seamlessly onto each other
Seven layers and 360 tour now live in AVAG, ready for virtual tours, heritage inspection, and future reconstruction planning
A fairytale castle with a very real surveying problem
Červená Lhota is one of the most photographed buildings in Bohemia. A four-winged Renaissance chateau perched on a rocky granite island in the middle of a fishpond in South Bohemia, it dates to the 14th century in its earliest Gothic form. The Káb family carried out its Renaissance remodelling between 1542 and 1555, and in 1597 the new owner Vilém Růt of Dírná had the facade rendered in red plaster, giving the chateau its name, červená meaning red in Czech. The stone bridge connecting it to the shore replaced the original drawbridge in 1622. Since 1949 it has been open to the public, drawing tourists, film crews, and fairy-tale productions in equal measure.
It is also, from a surveying perspective, a genuine puzzle. The pond wraps around the building on all sides, denying any scanner a close-range ground-level view of the lower facades. The interiors are dense with period furniture, ornamental plasterwork, mirrors, and narrow corridors. The surrounding terrain (rocks, forest paths, the shoreline) is uneven and access-restricted in places. And on a visitor day, there are tourists everywhere.
When AirView approached the chateau’s administrator about a collaborative, pro bono digital documentation project, the answer was immediate. The administrator agreed on the spot.
Three companies, seven devices, one coordinate system
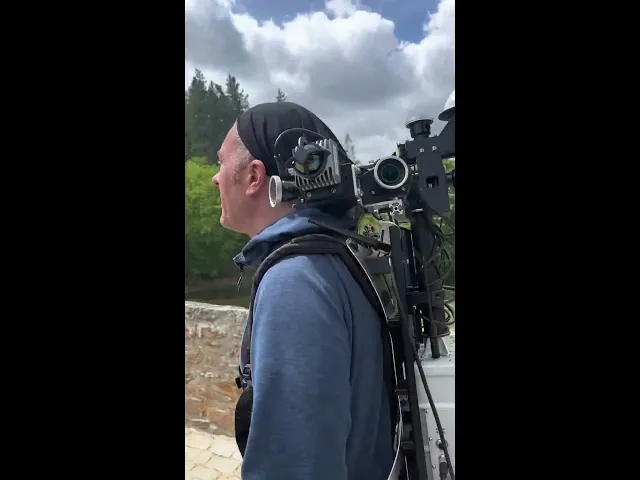
The project brought together three teams with complementary capabilities. AirView, the surveyors and developers of the AVAG platform, handled aerial LiDAR and mobile road mapping. 3gon handled all terrestrial and interior scanning with their Faro fleet. Mosaic contributed ground-level coverage on foot with their shoulder-mounted camera system.
The first task on site was establishing ground control. 12 GCP targets were distributed across the chateau grounds, creating a shared reference frame in EPSG 5514, the Czech national coordinate system, that every device would later be registered to. This was the foundation that allowed data from instruments with fundamentally different capture principles to ultimately sit on top of each other without gaps.
AirView: Drone LiDAR and the road network
Airview flew the DJI Matrice 400 with an L3 LiDAR payload in two configurations: a larger pass covering the full surrounding area, and a tighter flight focused on the chateau itself. The aerial LiDAR added a dense top-down point cloud covering everything the terrestrial scanners cannot see from the ground: rooflines, the courtyard from above, the forested slopes around the pond, and the terrain transitions between the water and the park.
On the ground, Airview drove the surrounding road network with a Mosaic X camera mounted on their car, capturing 360-degree imagery of all access roads and the wider area around the chateau. Together, the drone and the car gave the project its large-scale geographic context, the shell within which all the closer-range detail sits.
“What I love about this project is that nothing about it was easy—the site, the water, the tourists, the completely different capture device—and yet the data aligned beautifully. That’s the whole point of AVAG. It shouldn’t matter how hard the site was to capture. By the time it’s in the platform, it should just work.”

Miroslav Staubr
CEO, AVAG Pro
The photogrammetric flights
Airview also flew the DJI Mavic 3E RTK for RGB photogrammetry across a series of passes: nadir grid flights north–south, then rotated 90 degrees east–west, then oblique passes at 60 degrees, and finally a manual flight circling the chateau by hand to capture the angled facade details that automated patterns miss. Hundreds of images were collected: at one point 296 frames in under 3.5 minutes, at another 340 frames in 4 minutes. Unlike LiDAR, the photogrammetric model captures true surface color and appearance, and required no manual cleaning of the building itself, though the water surface around the chateau created noise that needed post-processing attention.
3gon: Three scanners, the whole building
3gon arrived with three Faro devices, each chosen for a specific part of the challenge.
The Faro Focus handled the exterior facades. A static terrestrial scanner capable of reaching 400 metres with millimetre-level accuracy, it was the only device that could bridge the distance imposed by the surrounding water. The scanner was positioned along the shoreline wherever the terrain allowed: on rocks, on the bank, at every stable point that minimized blind spots. A single Focus scan at full quality takes 20–25 minutes per station, so the device was used selectively: to anchor the outer shell of the building with high precision from across the water, and to capture the fine stucco ornamentation and carved facade detail that no other instrument at those distances could resolve.
The Faro Orbis Premium covered the entire interior. One operator carried the mobile SLAM scanner through the whole building, so all rooms on all floors, the atrium at multiple height levels, every corridor, and the surrounding park paths, in five hours. Accuracy across the full traverse sits at around 1 cm, which is more than sufficient for heritage passports and all but the most delicate reconstruction work. The Orbis’s integrated 72 MP camera produced richly coloured point cloud data throughout, giving every room texture and depth that renders directly as a walkable virtual tour in AVAG.
The Faro Blink covered the ground floor and parts of the atrium and bridge in two hours. A static scanner that completes a full scan including dual HDR imagery in under 30 seconds per station, it produces some of the most visually striking coloured point clouds of any device in the workflow, vivid, realistically lit, and ideal for public-facing virtual walkthroughs.

From field to office to AVAG
Back at 3gon’s office, all data was loaded onto workstations with 192–250 GB of RAM. Processing was configured and left to run overnight. By morning, the bulk of computation was complete. What followed was the human work: reviewing outputs, cleaning point clouds, removing people who had wandered into scanner sightlines in narrow corridors, stripping reflections from mirrors and window glass, in other words, the artifacts that laser physics inevitably produces and that only a trained eye can catch.
Office time ran to roughly double the field time, including both computation and manual quality checking. Then everything was uploaded to AVAG.
The data sat beautifully on top of each other. Indoor and outdoor aligned. Aerial and terrestrial aligned.

The complications were mostly tourists
In the field, almost nothing went technically wrong. Finding a working power socket in a 17th-century chateau for recharging batteries was a minor adventure. The water surface created the expected LiDAR noise and restricted where scanners could physically be placed. Rocks along the shoreline made stationary scanner positioning occasionally awkward.
The main challenge was people. Static scanners need a clear field of view. At one of Bohemia’s most-visited chateaux on an open visitor day, curious tourists would walk up to an unattended scanner and stand directly in front of it, or reach out to touch it. In narrow corridors, groups of visitors appear in the point cloud data and have to be manually removed. Mobile scanning handles this better than static; the Orbis operator could simply keep moving. The Focus and Blink stations required more patience.
“Heritage sites like this rarely get the documentation they deserve. Beautiful location, fascinating challenge, great people to work with. A cold day, but luckily dry. You can’t ask for much more than that.”

Ondrej Gresla
Business Manager, 3gon
Seven layers in AVAG
In AVAG, the Červená Lhota object currently contains seven layers: the mesh, the full LiDAR point cloud from all flights, the Matrice 400 L3 layer, the Mavic 3 Enterprise, and individual point clouds from the Faro Blink, Faro Focus, and Faro Orbis Premium. Users can switch between them, compare device outputs side by side, and explore the colored interior scans as a 360 virtual tour. The Mosaic X road imagery is also available in the 360 tour tab, letting users switch between scans and the full street-level coverage of the surrounding roads in a single view.
For a building that has stood for five centuries and never been comprehensively documented at this level of precision, it is the most complete and accurate record Červená Lhota has ever had. The full project will soon be made publicly accessible in AVAG so anyone can explore it for themselves.

AVAG highlights
~120 GB of data from 6 capture devices, all aligned in a single coordinate system
7 layers live in AVAG including drone LiDAR, RGB photogrammetry, and 3 separate scanner outputs
Under 1 cm accuracy across full indoor-outdoor documentation
Entire field capture completed in one day
“Červená Lhota is a great example of what AVAG was built for. Drone LiDAR, terrestrial scanners, mobile mapping cameras… Completely different capture devices, all landing in one platform and aligning to within a centimetre. That’s what happens when you build a platform around the idea that data should work together regardless of where it came from.”

Marek Ruzek
CTO, AVAG Pro
Project details
Červená Lhota
Site
Červená Lhota chateau, South Bohemia, Czech Republic
Teams
AirView (AVAG), 3gon, Mosaic
Building origin
14th century; Renaissance remodel 1542–1555; red facade from 1597
Devices
DJI Matrice 400 + L3 LiDAR, DJI Mavic 3 Enterprise, Mosaic X (vehicle-mounted), Mosaic shoulder camera, Faro Focus, Faro Orbis Premium, Faro Blink
Project type
Pro bono heritage documentation
Application
Make decisions in hours instead of weeks
Turn your data into action with AVAG. Capture, process, and visualize your site faster than ever.